首页/新闻动态/压电陶瓷传感器的工作原理及在人形机器人中的应用
压电陶瓷传感器的工作原理及在人形机器人中的应用
压电陶瓷传感器基于压电效应实现工作,当材料受到机械应力作用时,内部电荷分布会发生规律性变化,进而产生可检测的电势差。这种独特的机电耦合特性,使其能够直接将力学信号转换为电信号,无需额外的信号转换媒介,简化了传感系统的结构。
典型的压电陶瓷传感器采用“螺栓夹紧金属-陶瓷三明治结构”,该设计摒弃了传统传感器所需的传动机构,依托压电材料自身的直接变形完成能量转换,大幅简化了装置体积与复杂度。相较于电容式、电阻式等传统传感器,这种无接触测量方式有效减少了机械磨损,降低了故障发生率,显著提升了整个传感系统的可靠性与使用寿命。
先进的压电陶瓷传感器具备卓越的综合性能,核心性能特征如下:
超高分辨率:测量精度可达15纳米级,远超传统传感器,能够捕捉微小的力学变化;
极速响应:响应时间仅约0.5毫秒,可快速反馈力学信号,完全满足实时控制需求;
低滞后性:滞后率低于3.95%,有效避免信号失真,确保测量数据的精准度;
宽温度适应范围:工作温度覆盖-40°C至+125°C,可适应复杂的工业及机器人工作环境;
优异的线性度:非线性度小于0.1%FS(满量程),保障测量数据的稳定性与一致性。
这些优异的性能参数,使压电陶瓷传感器在高精度、快速响应、复杂环境的传感场景中,展现出传统传感器无法比拟的技术优势,为其在人形机器人领域的应用奠定了坚实基础。
一、人形机器人关节中的应用新可能
压电陶瓷传感器在人形机器人关节中的应用,主要聚焦于两个核心方向——作为驱动元件和作为测量元件,二者各有侧重,适配不同的关节工作需求。
当作为驱动元件时,压电陶瓷传感器通过摩擦耦合机制实现微位移放大:压电陶瓷片受电信号激励产生微米级的微小变形,再通过专门设计的机械结构,将这种微位移放大为毫米级甚至厘米级的宏观运动,从而驱动机器人关节完成精准动作。但该应用方案面临三大核心挑战:
摩擦力精密控制:接触界面的摩擦系数需严格把控,温度变化、机械磨损都会直接影响位移输出的稳定性与精度;
高精度装配要求:压电陶瓷元件的预压力需控制在±5%的范围内,预压力过大或过小,都会显著影响驱动效率与元件使用寿命;
复杂的控制算法:需针对性补偿压电效应本身的非线性、迟滞等特性,控制器的开发难度较高,对算法的精准度要求严苛。
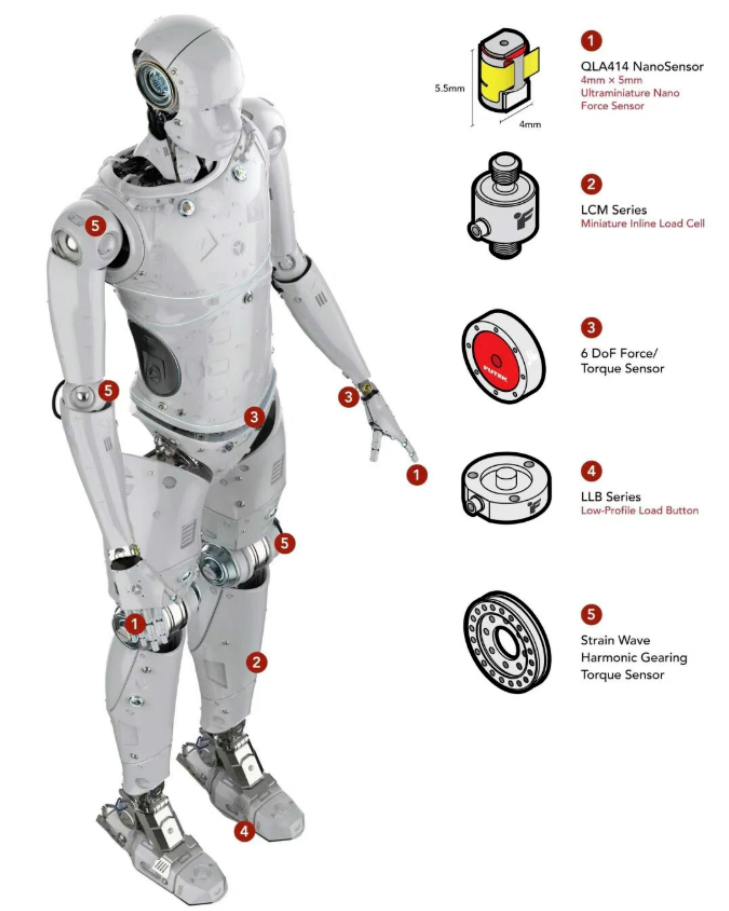
相较于直接作为驱动元件,压电陶瓷传感器更适合作为力矩传感器集成在机器人关节中,其核心优势集中体现在三个方面:
三维力检测能力:可同时精准测量x、y、z三个方向的力分量,全面捕捉关节运动中的力学变化,为关节控制提供全面的数据支撑;
动态响应优势:响应速度是传统应变片式传感器的5-10倍,能够快速反馈关节的力矩变化,适配机器人关节的高速运动与实时控制需求;
强抗电磁干扰能力:在机器人关节电机密集、电磁环境复杂的场景中,仍能保持稳定的测量性能,避免电磁干扰导致的信号失真。
二、指尖触觉:让机器人“会轻拿、会感知”
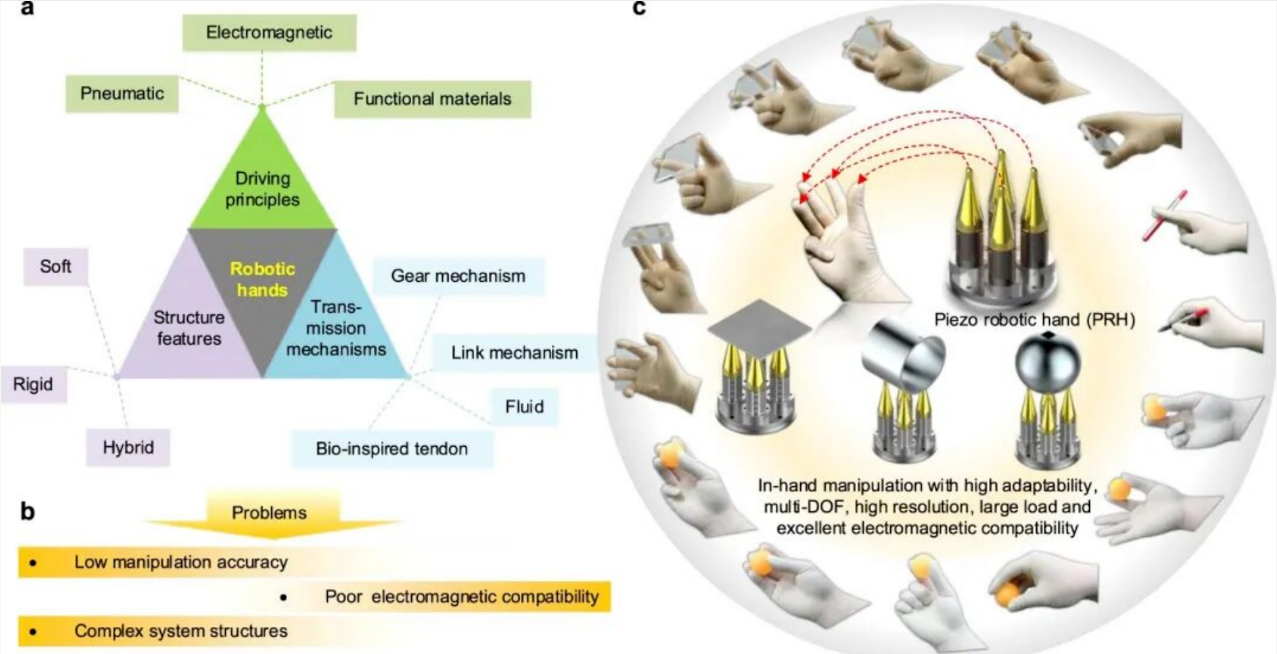
在人形机器人的手指、手掌等接触部位,压电陶瓷传感器可构建高灵敏度触觉阵列,模拟人类指尖的触觉感知能力,让机器人实现“精准感知、柔顺操作”,具体应用体现在三个维度:
压力分布映射:通过阵列化布置压电陶瓷传感器,可实时获取机器人手部与物体接触时的压力空间分布,清晰掌握接触状态,避免局部压力过大导致物体损坏;
动态触觉反馈:能够快速识别物体表面的纹理、硬度、粗糙度等细微特征,让机器人具备“触觉辨别”能力,适配不同材质、不同形态物体的抓取需求;
抓取力精准控制:基于实时触觉反馈数据,动态调整抓取力度,实现柔顺抓取,既能稳定抓取重物,也能轻柔拿起易碎、易损物体,大幅提升机器人的操作灵活性与安全性。
综上,压电陶瓷传感器凭借高灵敏度、快速响应、低功耗、抗干扰能力强等核心优势,在人形机器人的动态力测量、触觉感知、振动监测等关键场景中,具有显著的技术优势。从工程实践角度来看,当前阶段,压电陶瓷传感器更适合作为机器人传感系统的补充与升级,与现有传感技术协同工作,而非完全替代传统传感技术,未来通过技术优化的突破,其应用场景将进一步拓展,为人形机器人的智能化升级提供更强力的支撑。
热门新闻

新能源电池包FPC到CCS集成盖板:核心概念、主流工艺与技术趋势

TLX-8高频PCB板材核心优势解析:射频/微波工程师专属选材逻辑